生成式导航框架:基于3D高斯泼溅的实时路径预判实验
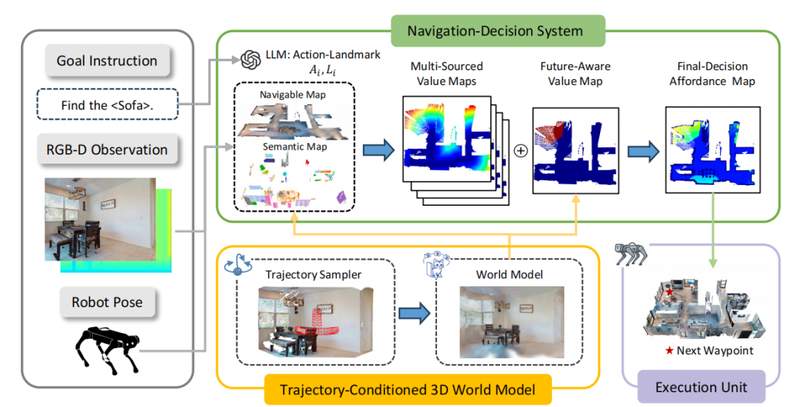
近期,一项关于机器人导航的研究引发了学术界关注。复旦大学付彦伟教授团队提出了一种全新的导航框架,其核心逻辑在于将“生成式想象”引入机器人路径规划中。传统导航系统依赖于实时传感器数据,极易受视野遮挡限制,导致在复杂动态环境中决策效率低下。该研究假设通过构建一个轨迹条件下的3D世界模型,机器人能够预先模拟多种未来场景,进而筛选出最优路径,从而克服“视觉盲区”带来的导航失效问题。
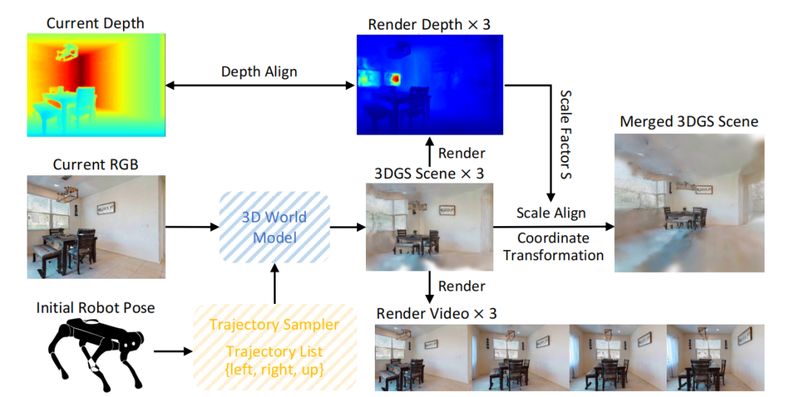
为验证这一假设,研究团队设计了严谨的实验方案。他们利用FlashWorld模型,结合3D高斯泼溅技术,使机器人能够在几秒钟内生成未来场景的立体画面,并将其与真实环境进行语义对齐。实验在Go2四足机器人上分三组进行:静态物体搜寻、动态物体追踪以及突发障碍规避。数据结果显示,在动态追踪与突发障碍场景中,该导航器的成功率显著高于传统对比方案。特别是在HM3D数据集的测试中,该系统在目标距离指标上表现最优,证明了其在实际应用中的高精度与鲁棒性。
逻辑推理:为何“想象”优于“感知”
实验数据分析表明,传统导航方案的局限性在于其决策过程仅依赖当前观测到的局部信息,缺乏对遮挡区域的逻辑推理能力。相比之下,该导航框架通过引入“轨迹条件”和“语义标签”,实际上是将导航问题转化为了一个基于概率的未来场景预测问题。这种转化不仅优化了路径选择,更在本质上提升了机器人对未知空间的探索效率。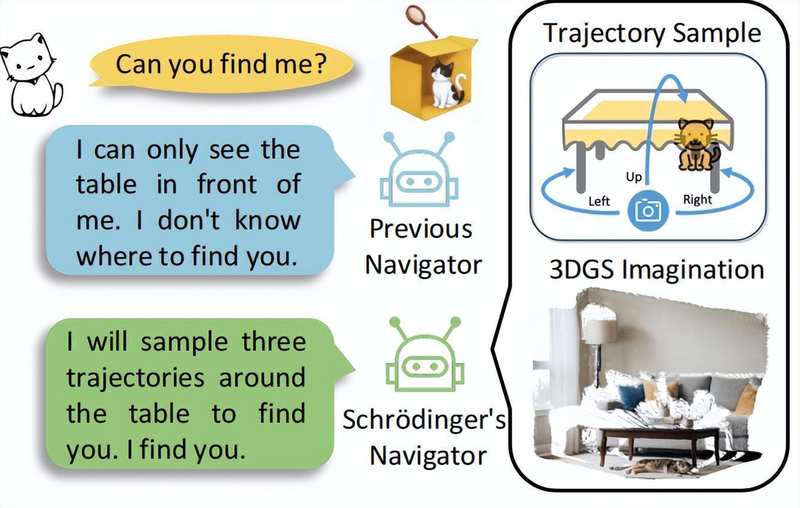
结论应用与未来展望:研究表明,这种将想象与决策机制耦合的框架,为人形机器人及四足机器人在复杂环境下的自主作业提供了新的技术路径。随着后续研究中多机器人共享3D世界模型的实现,该技术有望在搜救、家用服务等领域实现大规模应用。该方案的成功不仅在于算法的创新,更在于其通过实验证明了机器智能完全可以通过“构建内部世界模型”来跨越物理感知的边界,这为未来具身智能的发展提供了重要的实证参考。